robotika
- 1. Inform./Teknol.
Robotak diseinatzeko, ekoizteko eta funtzionarazteko erabilitako teknika-multzoa. Berez, automatikaren atala da.
1. Inform./Teknol.
-
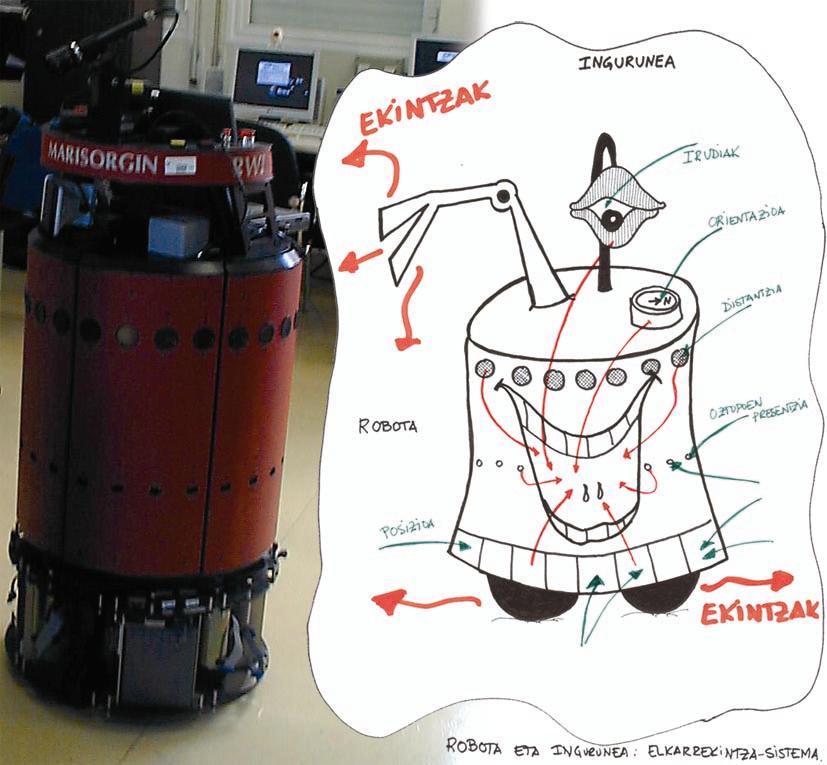
Robotak sentsore eta eragileen bitartez interakzionatzen du ingurunearekin. Marisorgin B21 robota -
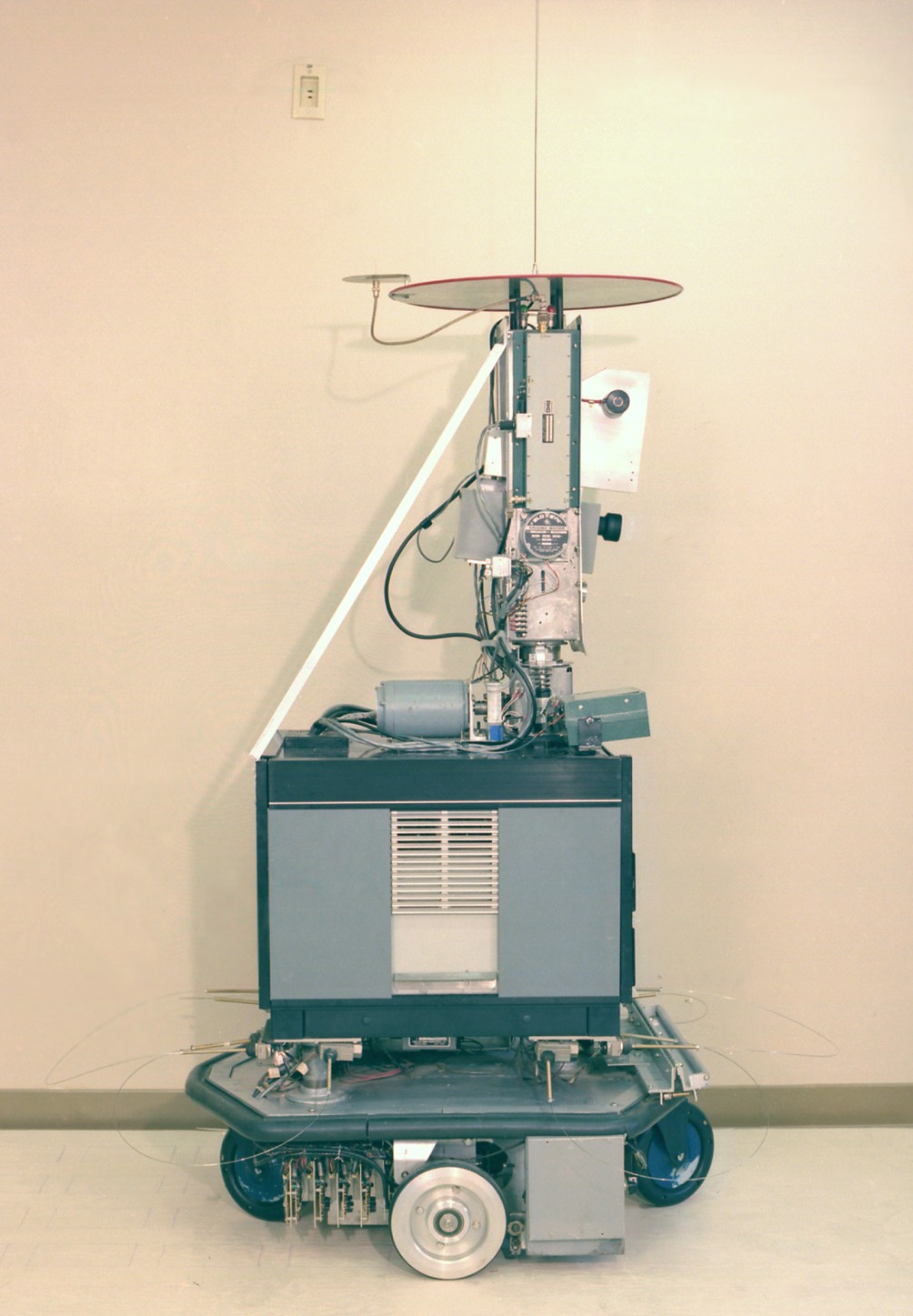
Shakey robota, Stanfordeko Adimen Artifizialeko Laborategian garatutakoa -
Robot industrialak -
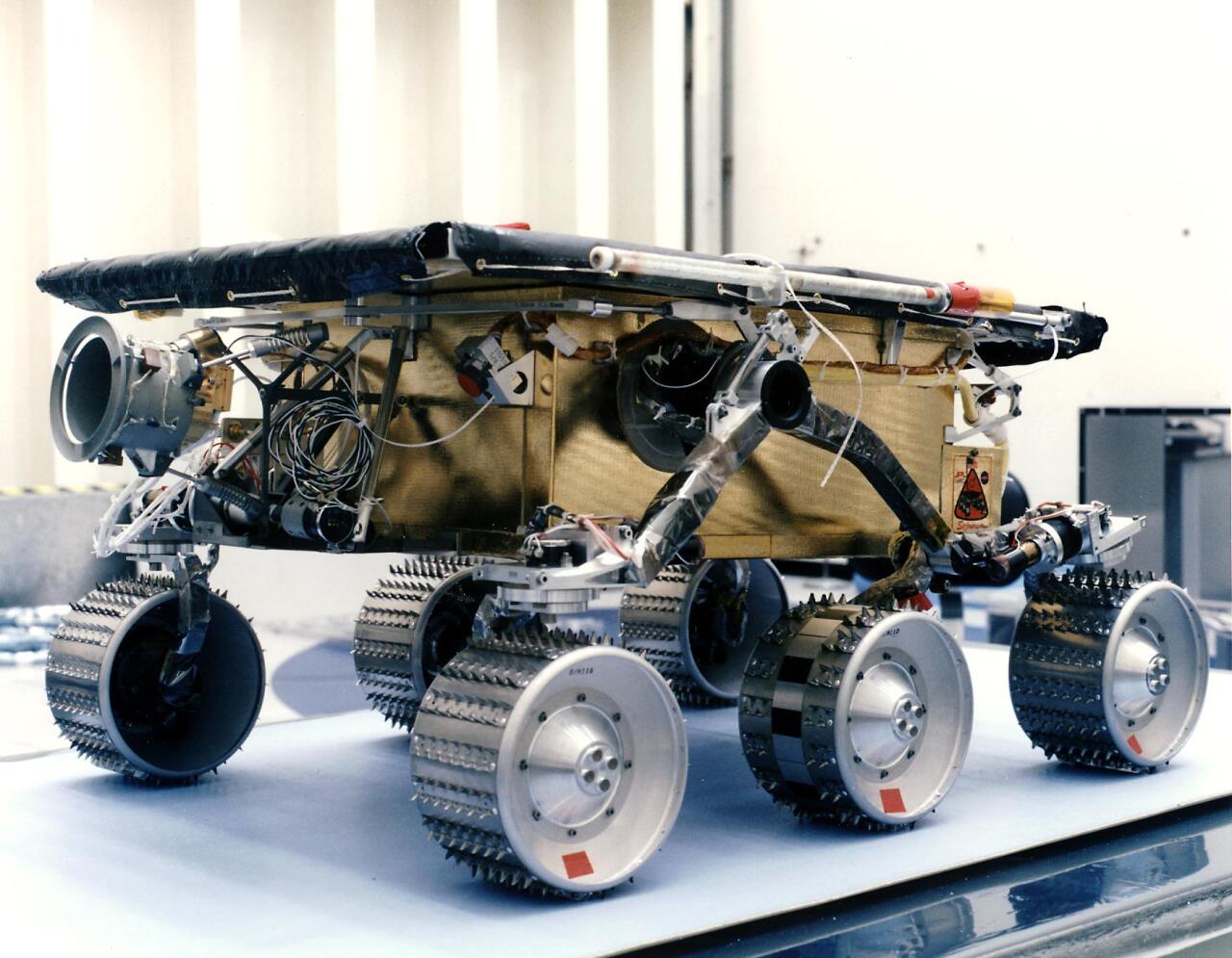
Mars Pathfinder misioan erabilitako Sojourner robota -

Asimo, Hondaren robot humanoidea -

Adinekoak zaintzeko Pearl robota -

Lego Mindstorms jokoarekin egindako robota
- 1. Inform./Teknol.
- Robotak diseinatzeko, ekoizteko eta funtzionarazteko erabilitako teknika-multzoa. Berez, automatikaren atala da.
Robotika Edit
Egilea: Aitzol Astigarraga, Elena Lazkano
Robot terminoak txekierazko robota hitzean du jatorria, eta lan behartua esan nahi du. Karel Čapek idazle txekiarrak erabili zuen lehen aldiz 1921ean, bere Rossum’s Universal Robots (R.U.R) antzezlanean. Lan hartan, gizarte teknologikoan gizakiak pairatzen duen gizagabetzea salatu zuen, gizakien mendeko kopia edo klon artifizialak aurkeztuz; robotak alegia.
Robot terminoa aipatzean, fikziozko film eta liburuetako makinak datozkigu gogora: mugitzeko eta hitz egiteko gai diren giza itxurako makina adimendunak, gehienetan. Baina robot hitzak biltzen duen ideia askoz ere zaharragoa da. Ez dago zehatz esaterik noiztik, baina zientziaren, eta, beraz, gizakiaren, aspaldidaniko helburua izan da izaki artifizial adimendunak eraikitzea. Antzinako Grezian jada ageri dira gizakien lana errazteko automata mekanikoak. Zientziak eta teknologiak aurrera egin ahala, gero eta makina sofistikatuagoak eraiki ditu gizakiak. Baina, batez ere, XX. mendearen bigarren erdian, zirkuitu integratuak agertu zirenetik, konputagailuen ahalmena Mooreren legeari jarraiki handitzeari esker eraiki ahal izan dira robotak gaur egun imajinatzen ditugun bezala. Ordura arte, automatak ziren roboten ahaiderik hurbilenak.
Duela gutxi arte, 1970eko hamarkada arte, robotak manipulatzaile hutsak ziren, industrian lan mekanikoak automatizatzeko diseinatuak. Baina azken hamarkadetako aurrerapausoekin kontzeptu hori zabaldu egin da, eta robotekin erlazionatzen dira, besteak beste, arrazoibidea, ikaskuntza eta arazoen ebazpena nozioak.
Gaur egun, oraindik ez gara gai robot terminoaren definizio estandar edo bateraturik emateko. Herrialde batetik bestera aldatu egiten da esanahia. Robot kategorian zein makina sartzen diren eta zein ez, pil-pilean dagoen eztabaida da gaur egun. Joseph Engelberger robotika industrialaren aita pontekoak zera esan zuen behin: “Ezin dezaket definitu zer den robota, baina bat ikusi orduko ezagutzeko gauza naiz”.
Honako hau litzateke unean uneko zientzia eta teknologiaren aurrerapenei loturik ez dagoen robot terminoaren definizio bat: sistema artifizial autonomoa da robota, ingurunean gertatutakoaren berri sentsoreen bidez jasotzen duena eta, bere helburuak lortzearren, ingurune horretan ekintzak gauzatzeko gai dena.
Azaldu ditzagun banan-banan gure definizioak aipatzen dituen ezaugarriak:
-
Sistema artifiziala: berez naturan aurkitzen ez dena, gizakiak berariaz sortua. Izaki bizidunak ez dira robot kategorian sartzen.
-
Autonomia: robotak erabaki propioak hartzeko duen gaitasunari deritzo autonomia. Robotak izan dezakeen autonomia-espektroa oso zabala da: batere autonomiarik ez duten robotetatik hasi (teleoperatuak edo telegidatuak, gizakiak urrunetik kontrolatzen dituen sistemak) eta erabateko autonomia duten robotetaraino (gizakiak ez du esku hartzen haien funtzionamenduan, ezta haien mantentze-lanean ere).
-
Pertzepzioa: bere ingurunean gertatzen dena hautemateko (ikusteko, entzuteko, ukitzeko, usaintzeko...) sentsoreak behar ditu robotak. Sentsoreen bitartez jasotzen ditu ingurunean gertatzen diren aldaketak, bai eta robotaren beraren barne-egoerari buruzko informazioa ere.
-
Ekintza: sentsoreetatik jasotako informazioari erantzuteko eta bere helburuak lortzeko, ekintzak gauzatu behar ditu robotak. Era askotako ekintzak gauzatu ditzake: mugitu, hitz egin, heldu, bultza egin, etab.
-
Helburuak: robotak helburu bat edo batzuk ditu, eta helburuak betetzera bideratuko ditu bere ekintzak. Helburuak oso sinpleak izan daitezke, mugitu inorekin talka egin gabe modukoak; eta/edo konplexutasun-maila handiagokoak, lurralde ezezagunak esploratu.
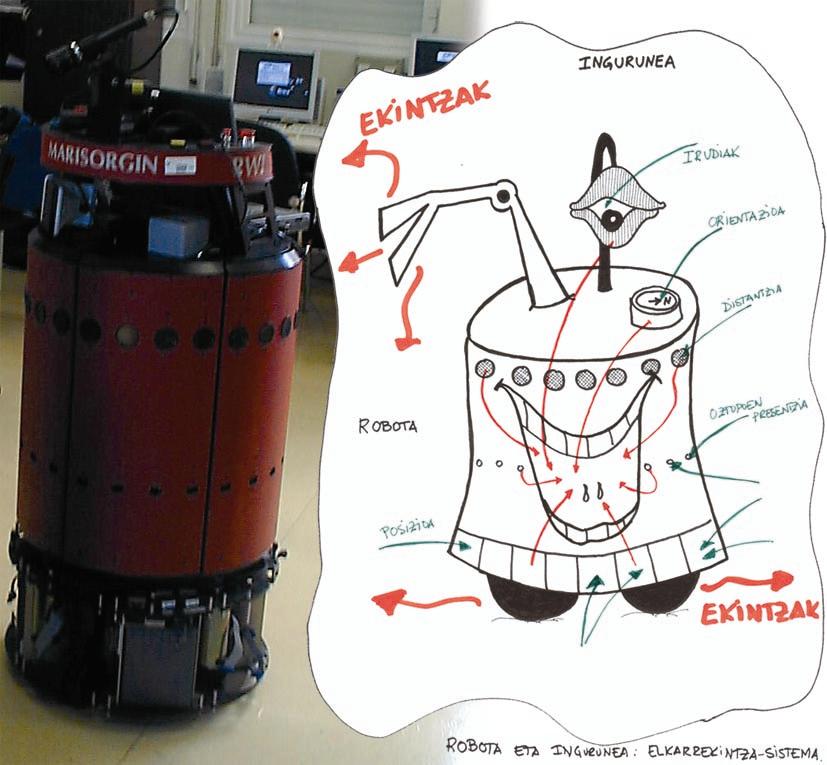
Robotak sentsore eta eragileen bitartez interakzionatzen du ingurunearekin. Marisorgin B21 robota
HISTO RIA LABURRA
Robotikaren historian eragin duten gertakizun aipagarrienetako batzuk:
-
Automatak: 1738an, Jacques de Vaucansonek bere ahate mekanikoa aurkeztu zuen. Vaucansonen makina “biziduna” gauza zen hegoak mugitu, karranka egin eta garia irensteko. Descartesen printzipioei jarraiki, animaliak funtsean automata hutsak direla sinetsirik eraikitako makina izan zen (automata).
-
Zibernetika: 1940ko hamarkadan, zibernetikaren arloa sortu zuen Robert Wienerrek. Kontrol-teoriako printzipioak erabiliz, zibernetikak sistema biologikoak aztertu zituen, eta horiek robotetan inplementatzeko ahaleginak bideratu.
-
Robot autonomoak: gaur egungo robotikaren ikuspegitik, Grey Walterren dortokak (1950) dira lehenbiziko robot autonomoak. Dortoka-itxurako ibilgailu haiek bina sentsore zituzten: argi-sentsorea eta objektuekin talkak detektatzeko sentsorea. Bi estimulu-iturri haiek erabiliz, oinarrizko nabigaziorako gaitasuna erakutsi zuten dortokek.
-
Adimen artifiziala: zientziaren arlo berri gisa, 1956an sortu zen Adimen Artifiziala (AA). Adimen-prozesuen konputagailu-ereduak garatzea du helburu, adimena, funtsean, konputagailu-programa bat balitz bezala interpretatuz: sarrera-datuak jaso (pertzepzioa), datu horiek prozesatu (kognizioa) eta, azkenik, irteera-datuak sortu (ekintza). AAk eragin nabarmena izan zuen robotikan, eta, hurrengo urteetan, haren printzipioetan oinarrituta egindako robot ugari agertu ziren; besteak beste, hauek: Shakey (1971), Cart (1977), eta CMU Rover (1983).

Shakey robota, Stanfordeko Adimen Artifizialeko Laborategian garatutakoa (iturria: SRI International)
Gaur egungo robotika aipatutako arloetako aurrerakuntzen ondorioa da, batik bat.
ROBOT BATEN ELEMENTUAK
Robot batek funtsezko hiru osagai ditu: sentsoreak, eragileak eta kontroladorea.
Sentsoreak
Ingurune fisikoari buruzko informazioa jasotzen duten gailuak dira. Sentsoreen bitartez, robotak bere egoerari buruzko informazioa jasoko du etengabe: inguruneari edo munduari buruzko robotaren pertzepzioari dagokio kanpo-egoera; barne-egoera, berriz, robotaren beraren egoerari.
Sentsoreak bi multzotan sailkatu daitezke:
-
Pasiboak (P): ingurunearen ezaugarri fisikoak neurtzen dituzte detektagailu berezien bidez.
-
Aktiboak (A): seinale edo estimulu propioa sortzen duten sentsoreak dira, eta seinale horrek ingurunean sortzen duen elkarrekintza da neurtzen den propietatea.
Gaur egun, robot autonomoetan sentsore hauek erabiltzen dira sarrien:
-
Talka-sentsoreak (P): etengailuak baino ez dira, eta sentsoreak beste objekturen batekin talka egin duen detektatzen dute. Adibidez, pintza edo matxarda batean kokatuz gero, matxarda guztiz irekita edo guztiz itxita dagoen jakiteko erabil daiteke. Robotaren aurrealdean kokatuz, robotak oztoporen batekin topo egin duela jakiteko balio dezake.
-
Argi-sentsoreak (P): fotozelulan sartzen den argiaren intentsitatea neurtzen dute. Sentsore-mota honekin, robotak argi-iturriak detekta ditzake.
-
Kodetzaileak (P): motorren ardatzetan kokaturik, ardatzak ematen duen bira-kopurua neurtzeko erabiltzen dira. Kodetzaileen bitartez, robotaren uneko posizioari eta/edo abiadurari buruzko informazioa lor dezakegu. Abiadura-neurgailuek, adibidez, gurpilen biratze-abiadura neurtzen dute, eta odometroek, aldiz, gurpilen bira-kopurua. Biak ala biak kodetzaileetan oinarritutako sentsoreak dira.
-
Infragorriak (A): argi infragorria giza begiek hauteman dezaketen argi-espektrotik kanpo gelditzen da, eta oso erabilia da robotikaren alorrean. Igorle eta hartzaile banaz osatutako sentsore-mota da: igorleak argi infragorriaren uhina bidaltzen du, eta islatutako argia jasotzen du hartzaileak. Islaren angeluari buruzko informazioa erabiltzen da distantziaren neurria lortzeko.
-
Ultrasoinuak (A): giza entzumenetik kanpo dagoen soinuaren maiztasunari egiten dio erreferentzia. Sonar izenez ezagunagoak dira, eta orain dela gutxi arte sentsore horiek erabiltzen ziren robotetan gehien. Soinu-uhina igorri eta haien oihartzuna jaso bitarteko denbora neurtzen dutenez, erabilgarriak dira inguruneko objektuekiko hurbiltasuna neurtzeko (saguzarrek mekanismo bera erabiltzen dute objektuak ekiditeko).
-
Laserrak (A): sonarren antzera funtzionatzen dute, baina laser argi-uhinak baliatzen dituzte soinu-uhinak erabili ordez. Sonarrak baino askoz ere azkarragoak eta zehatzagoak dira, baina baita garestiagoak ere.
-
Kamera digitalak (P): ikusmena da pertzepzio-modurik konplexuena, bai biologian, bai eta robotikan ere. Ikusmen naturalean, giza eta animalia-burmuinen jarduerarik handiena ikusmen-prozesuari dedikatzen zaio. Baina, haatik, informazio-iturri aberatsena eta erabilgarriena ere horrek eskaintzen du. Beste hainbeste gertatzen da robotikan ere, nahiz eta ikusmen-sentsore naturalak eta sintetikoak oso desberdinak izan. Kamera bidez irudi artifizialak jasotzeko prozesua honela laburbil daiteke: kamera batetik irudi-plano bat jasotzen da objektuetatik heltzen den argiaren informazioarekin. Irudi-planoa pixeletan banatua dago, laukizuzen-sare baten eran antolatua, normalean. Pixel bakoitzaren argitasuna proportzionala da pixel hori proiektatzen duen objektu edo gainazalak kameran islatu duen argiaren intentsitatearekiko. Kamerak bideoa kapturatzen duenez, aurreko prozesua behin eta berriro errepikatu behar da, eta denboran zeharreko fotogramen (frame) segidak prozesatu. Irudia lortutakoan, irudi horretatik robotarentzako informazio erabilgarria erauzteko prozesua dator, eta, horretarako, teknika ugari garatu dira: irudietako objektuen ertzak detektatzea, ereduetan oinarritutako ikusmena, ikusmen aktiboa, etab. Irudi artifizialetatik informazio esanguratsua lortzeko garatu diren metodo edo teknikak dira estrategia horiek guztiak.
-
GPS (A) (Global Positioning System): lokalizazio-sistema hau gero eta gehiago erabiltzen da autoetan, eta robotetan ere erabil daiteke, baina kanpo-ingurunetan aritzen direnetan baino ez. Barne-ingurunetan, zehaztasuna galtzen dute, seinaleen interferentziak direla eta.
Eragileak
Eragileak dira robotak bere ingurunean ekintzak gauzatzeko dituen gailuak. Gizakiok ekintzak gauzatzeko ditugun gorputz-atalen (besoen, hanken, atzamarren, mingainaren...) baliokide robotikoak dira. Eragilearen azpian datzan mekanismoari eragingailu deritzo. Similarekin jarraituz, besoak eta hankak mugitu ahal izateko ditugun muskulu eta tendoiak dira eragingailuak.
Sentsoreetan bezala, eragile eta eragingailu robotikoak eta biologikoak arras ezberdinak dira, nahiz eta funtzio bera bete.
Eragileek bi funtzio nagusi dituzte:
Lokomozioa
Robota leku batetik bestera mugitzea. Funtzio honekin erlazionatutako robotikaren arloari robotika mugikor deritzo, eta lur gainean, airean edo ur azpian mugitzen diren robotez arduratzen da. Lur gaineko robotei dagokienez, erabilienak robot gurpildunak dira, horiek baitira kontrolatzen errazenak. Robot hankadunak ere badira, esate baterako, inurri- eta armiarma-erako robotak, sei edo zortzi hanka dituztenak; baina ibiltzeko gaitasunak konplexutasun handia gehitzen dio robotaren kontrolari.
Badira pertsona-itxurako robotak ere, humanoideak, gure antzera bi hanken gainean mugitzen direnak eta besoak erabiltzen dituztenak orekari eusteko. Garrantzitsua da hanka-kopurua; izan ere, bi hanken gainean dabilen robotaren ibilera kontrolatzea askoz konplexuagoa da lau edo zortzi hanken gainean dabilenarena kontrolatzea baino.
Manipulazioa
Mundu fisikoan ekintzak gauzatu behar dituzten robotek objektuak maneiatu behar dituzte nolabait: heldu, biratu, bota, etab. Robotak horretarako erabiltzen dituen eragile bereziei manipulagailu deritze. Funtzio honekin erlazionatutako arloa robot manipulatzaileena da, eta beso robotikoa da horren eragilerik ohikoena.
Eskuen funtzioa betetzen duten eragileak ere badira, matxarda mekanikoak, esate baterako. Gaur egun, esku-itxurako eragileak (3, 4, 5 hatzekin) ere jartzen dira beso-muturretan; hatz artikulatuak dituzte, gureen antzekoak, indar-sentsoreez eta posizio-sentsoreez hornituta, esku artean dagoena sentikortasunez detektatu ahal izateko.
Dena den, robot mugikorren eta manipulatzaileen arteko bereizketa desagertzeko bidean da, batez ere, azkenaldiko humanoideen garapenarekin. Giza itxurako robot horiekin manipulazioa eta lokomozioa uztartzeko ahaleginetan dihardute ikertzaileek.
Aipatu ditugun eragileak (gurpilak, hankak, beso artikulatuak) mugitu ahal izateko, eragingailuak behar dituzte robotek. Eragingailuen zeregina energia mugimendu bihurtzea da. Zalantzarik gabe, eragingailurik erabilienak motor elektrikoak dira, baina badira beste batzuk ere:
-
Motor elektrikoak: energia elektrikoa energia mekaniko bihurtzen duten gailuak dira. Ezagunenak DC motorrak dira (direct current, korronte zuzen), segur aski. Motor-mota horiek imanak, hari eroalea eta korronte elektrikoa erabiltzen dituzte eremu magnetikoa sortzeko, eta, eremu hori baliatuz, errotazio-mugimendua sortzeko motorraren ardatzean. Horien abiadura kontrolatzen da normalean . Bestetik, serboak erabiltzen dira artikulazioetan, DC motor batez eta erredukzio-kutxa batez osatutako gailuak; horietan, posizioaren kontrola da ohikoena.
-
Pneumatika: aire bidezko presioan oinarritutako eragingailuak dira. Presioa aldatu ahala, eragingailua mugitu egiten da. Besteak beste, muskulu biologikoen funtzionamenduan oinarritutako Muskulu Artifizial Pneumatikoak dira ezagunenak (PAM, Pneumatic Artificial Muscles).
-
Hidraulika: fluidoen presioan oinarritzen dira hauek. Presioa aldatu ahala, eragingailua mugitu egiten da.
Gaur egun erabilienak aipatutako horiek izan arren, ingeniaritza- eta teknologia-alorretako aurrerapenei esker, etengabe sortzen dira eragingailu berriak.
Kontroladorea
Robot mugikorren kontrol-sistema prozesu gisa ikus genezake: robotak, sentsoreen bitartez, inguruneari (munduari) buruzko informazioa jasotzen du lehendabizi. Ondoren, jasotako informazioa prozesatzen du, gauzatuko dituen ekintzei buruzko erabakiak hartu ahal izateko. Azkenik, erabakitako ekintzak gauzatzen ditu bere ingurunean (munduan). Robotaren ekintzek munduaren egoera aldatzen dute, eta, sentsoreen bitartez, informazio berria eskaintzen diote robotari.
Kontroladoreak berebiziko garrantzia dauka robotean; esan genezake gure garun eta nerbio-sistemaren funtzioa betetzen duela: sentsoreetatik informazioa jaso ondoren, erabakiak hartu eta robotaren ekintzak bideratzen ditu.
Kontroladoreak hardware edo eta software bidez inplementa daitezke, eta kontrol-arkitektura izena hartu ohi dute. Kontrol-arkitekturek definitzen dituzte kontrol-sistemak diseinatzeko, garatzeko eta antolatzeko printzipioak eta murriztapenak. Lau kontrol-arkitektura mota bereizten dira:
-
Arkitektura deliberatiboak: ingurunearen plano edo errepresentazio sinbolikoak erabiltzen dituzte, eta helburua iritsi bitarteko ekintza guztiak pausoz pauso planifikatzen. Planifikazioak, baina, denbora eskatzen du, eta ustekabeko gertaerei azkar erantzuteko zailtasunak izaten dituzte arkitektura deliberatiboko robotek.
-
Arkitektura erreaktiboak: erreflexuen bidez gidatutako robotak dira; ez dute planifikatzeko gaitasunik. Oinarrizko erregela batzuen bidez sentsoreetatik jasotako estimuluei erantzuten diete.
-
Arkitektura hibridoak: sistema erreaktiboen erreflexu gaitasuna eta sistema deliberatiboen planifikatzeko gaitasuna konbinatzen dituzte tarteko modulu berezi bat erabiliz. Gaur egun, arrakastatsuenek sistema probabilistikoetan oinarritzen dute kontrola.
-
Portaeretan oinarritutako sistemak: robotaren portaera orokorra oinarrizko portaera edo gaitasun-moduluetan banatzean datza estrategia hau. Oinarrizko gaitasunen arteko konbinazio egokian dago gakoa, denbora errealean erantzuteko eta, aldi berean, aurrera begirako planak gauzatzeko gaitasuna izan dezan robotak. Sistema biologikoak hartzen dituzte eredutzat.
ROBOTEN APLIKAZIO-EREMUAK
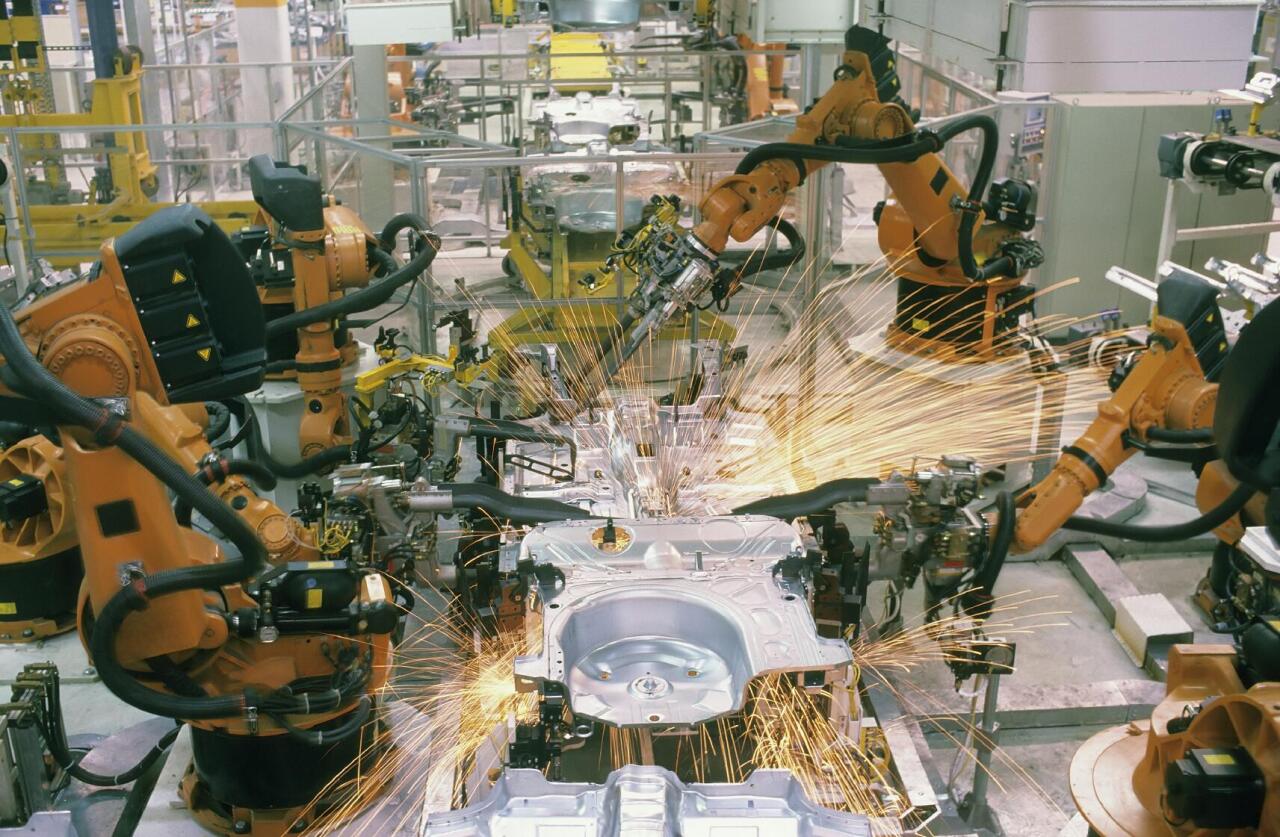
Robot industrialak
Lantegi askotan robotak gizakia ordezkatu du. Lan errepikakorrak azkar, zehatz eta modu fidagarrian egiteko erakutsi duten ahalmenak roboten ugaltzea ekarri du ezinbestean. Robot industrialen aplikazio-eremu nagusiak automobilgintza, elektronika-lantegiak eta lehengaiak paketatzeko lantegiak dira.
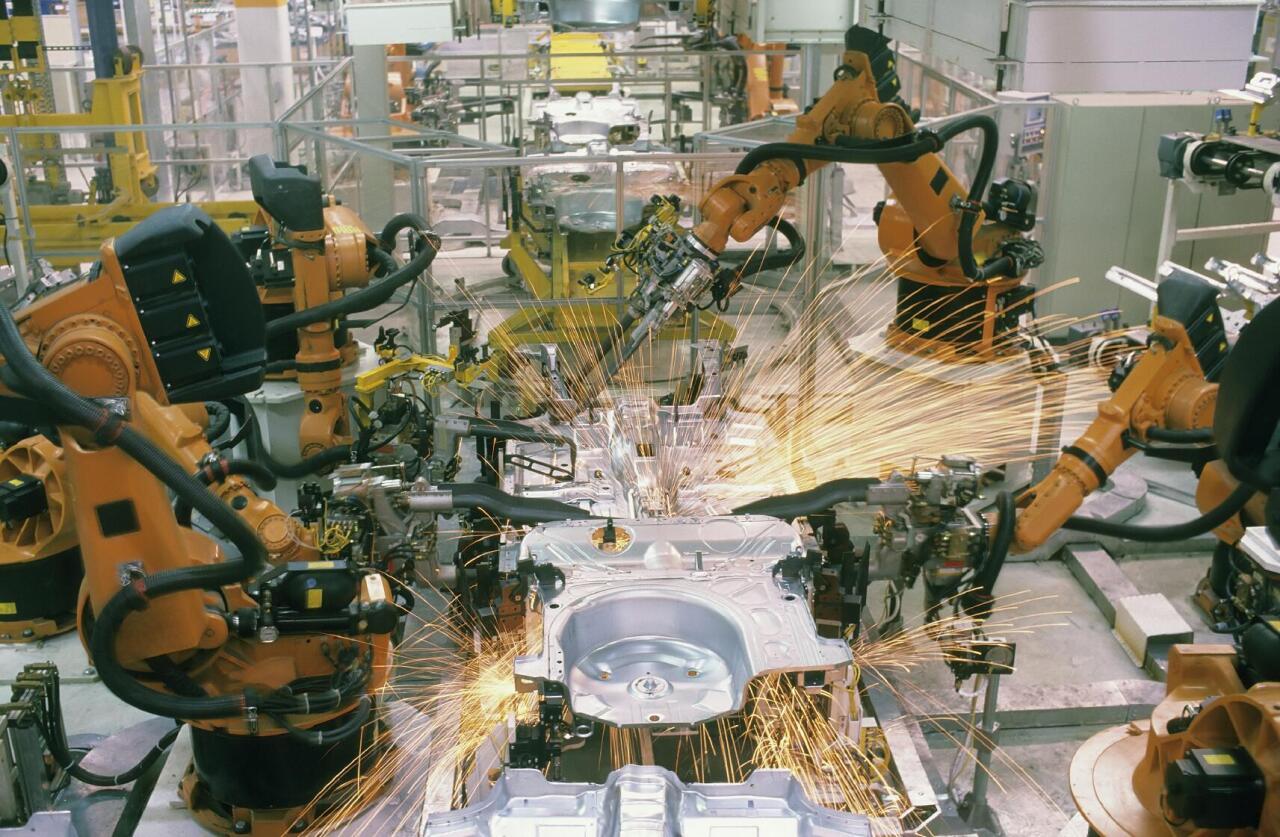
Robot industrialak
Espazioaren esplorazioa
Espazioaren esplorazioan robotikak dagoeneko ekarpen garrantzitsuak egin ditu. 1997an, NASAk Mars Pathfinder Sojourner robota bidali zuen Martera (Lurretik 500 milioi km-ra). Huraxe izan zen beste planeta batean modu autonomoan nabigatu eta gertaera ezezagunen aurrean erreakzionatzeko gaitasuna erakutsi zuen lehen robot adimenduna. Izan zuen arrakastaren ondoren, espazio-agentziak buru-belarri dabiltza planeta berriak esploratu, espazio-ontziak konpondu eta/edo astronautei lagunduko dieten robotak garatu nahian.
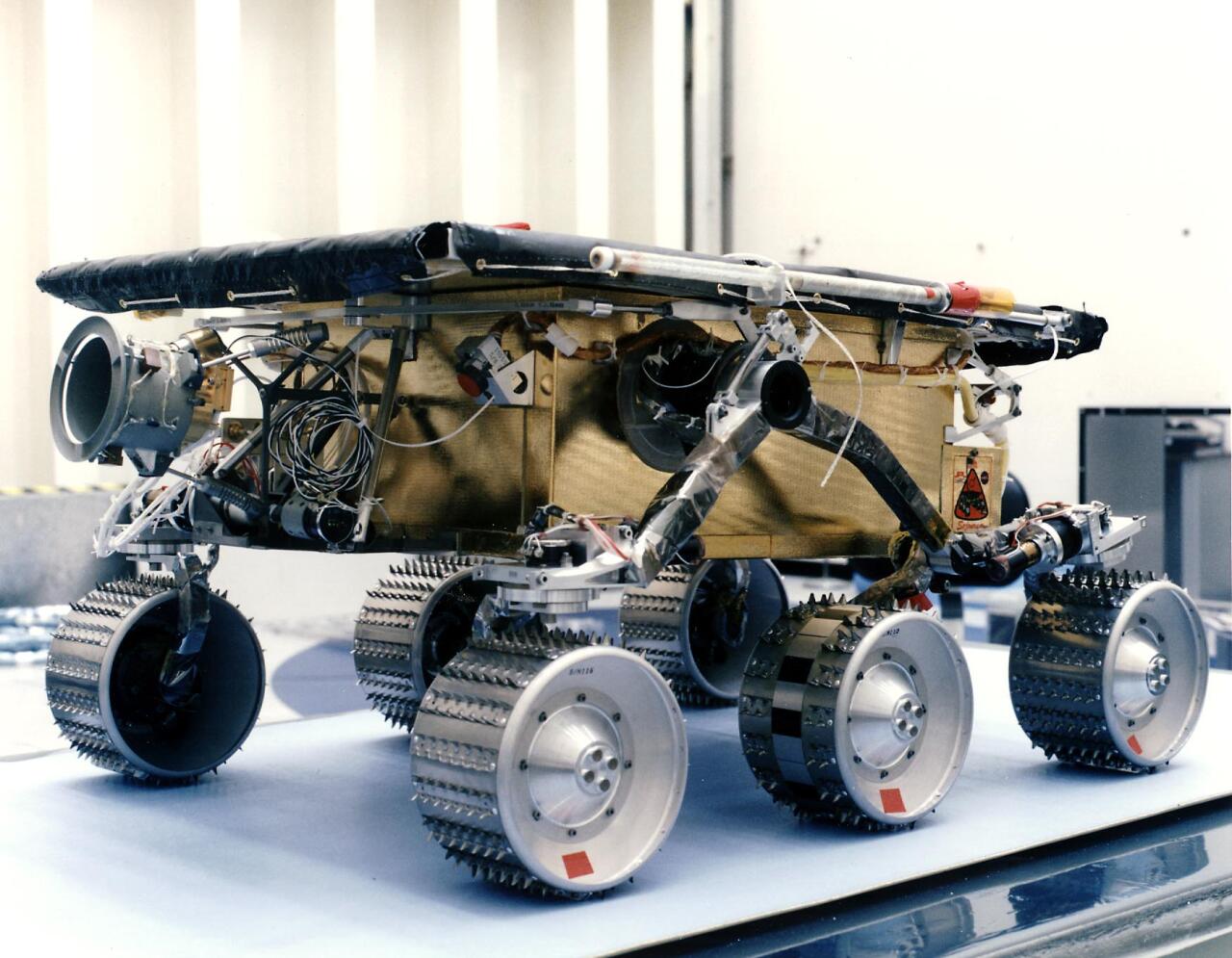
Mars Pathfinder misioan erabilitako Sojourner robota (iturria: NASA)
Medikuntza
Medikuntzan ere nabarmena da robotikaren eragina. Zehaztasunak berebiziko garrantzia du ebakuntza kirurgikoetan, eta, urrunetik kontrolatutako roboten bidez, gizakiak iritsi ezin duen zehaztasunez egin daitezke ebakuntzak gaur egun. Makina hauek, gainerako robotek ez bezala, ez dute inolako autonomiarik, medikuek kontrolatzen edo gidatzen dituzte robotaren mugimendu guztiak. Bestalde, medikuak eta robotak ez dute zertan gela berean egon. Teleoperazio bidez, beste herrialde batean dagoen gaixo bat opera daiteke gaur egun. Adibide gisa, inbasio minimoko printzipioan oinarrituz, Da Vinci robotak lanabes endoskopikoak maneiatzen ditu zehaztasun handiz zirujau batek gidatuta, eta ebakuntza osteko susperraldia nabarmen laburtzea lortu da.
Humanoideak
Humanoideak gizakiaren itxura duten robot autonomoak dira. 1997an, Honda etxeak P3 merkaturatu zuen, bere lehenengo humanoidea. 2000n, Asimo heldu zen. Azken belaunaldiko humanoideek erakusten dituzten gaitasunen artean honako hauek aipa genitzake: jendearekin eta objektuekin talka egin gabe ibiltzeko gaitasuna, beren burua modu autonomoan elikatzea, gizakiarekin elkarrekintzan jardutea eta ikaskuntza (egoera berrietara moldatzen jakitea).

Asimo, Hondaren robot humanoidea
Ezinduen eta helduen laguntza
Robotika ari da, poliki-poliki, lantegi eta laborategietatik atera eta gure eguneroko ingurune eta beharretara egokitzen. Horren adibide dira helduak eta ezinduak zaintzeko sortutako robotak: batetik, lagun egiteko “maskota” interaktiboak; bestetik, ospitaleetan laguntzaile aritzeko robotak, besteak beste, botikak bereizten dituen Maggi robota.

Adinekoak zaintzeko Pearl robota (iturria: NSI-National Science Foundation)
Hezkuntza
Robotikak aukera anitz ematen du ikasgelan lan egiteko. Teoria pixka batekin eta praktika askorekin robotikaren hastapenak landu daitezke, robot txikiak eraikiz eta kontrola programatuz. Badaude horretarako teknologia batzuk: egitura fisikoak eraikitzeko Lego eta Mecanno, eta erraz programatu daitezkeen kontroladore sinpleak.

Lego Mindstorms jokoarekin egindako robota (iturria: Eirik Refsdal)
Aisialdia
Robotak iritsi dira gure aisialdiko eremuetara. Gune askotan topa genitzake gaur egun: museoetan, gida-lanak egiteko robotak; golf-zelaietan edo jolas-parke teknologikoetan, leku batetik bestera joateko ibilgailu autogidatuak eta abar.
Biorrobotika
Robotikaren adar honek naturan dauden sistema biologikoen funtzionamendua ulertzea eta egiaztatzea du helburu, eta, horretarako, sistema artifizialak eraikitzen ditu.
ROBOTIKA ZENBAKITAN
IFR (International Federation of Robotics) erakundearen Estatistika Departamentuaren arabera, 2007an 951.000 robot industrial zeuden jardunean munduan zehar. Horietako % 50 inguru Asian zeuden; herena, Europan; eta % 16, Estatu Batuetan.
Zerbitzu-robotak
2006an, erabilera profesionalerako 40.000 zerbitzu-robot ezarri ziren munduan barrena. Aplikazio-eremurik garrantzitsuenak hauek izan dira: defentsa, erreskate eta segurtasunerako robotak; ur azpiko sistemak; robot garbitzaileak; eraikuntza- eta eraiste-lanetarako robotak; medikuntzarako robotak; eta erabilera orokorreko robot mugikorrak. 2007-2010 artean 35.500 unitateko gehikuntza espero da alorrean.
Erabilera pertsonalerako eta domestikorako robotak
2006. urtearen aurretik, 3,5 milioi zerbitzu-robot saldu ziren erabilera pertsonal eta domestikorako. Batez ere, aspiragailuen, belarra mozteko roboten eta entretenimendurako roboten salmenta handitu da. Aspiragailuak 2001ean merkaturatu ziren, eta 2002-2004 urte-bitartean milioi bat unitate baino gehiago saldu ziren. 2007-2010 tartean, aurreikuspenen arabera, 1,34 milioi robot domestiko edo etxeko robot berri salduko dira. Entretenimendurako roboten salmentak, aldiz, 2,2 milioi unitatetara iristea aurreikusten da.